1.稳定性要求
即膝关节在受力条件下要稳定,不能打弯造成截肢者跌倒。
2.助伸要求
在向前迈步时要能够代偿股四头肌的功能,带动小腿向前摆动,不能使小腿落后于大腿。
3.摆动控制要求
在摆动中期要能使小腿加速,摆动结束时要能使小腿减速。不让腿伸直时有过大的冲击,引起膝关节的碰撞声。另外还有体积小、重量轻、强度大、寿命长等要求。
常用的大腿假肢膝关节机构
为了满足上述要求,人们设计出了各式各样的膝关节机构。最简单的膝关节机构为一个自由摆动的单轴关节。复杂一点的膝关节有可调定摩擦摆动控制膝关节;有模拟真实膝关节转动轴心瞬间变化的四连杆机构关节;有承重自锁关节;更复杂的还有液压或气动控制的关节;最先进的是微机控制的膝关节机构。
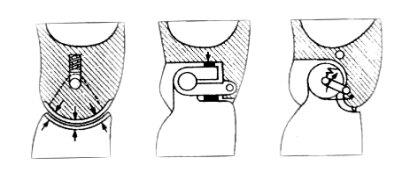
1.假肢膝关节的支撑期稳定控制机构
(1)手控的带锁膝关节:是最简单的控制膝关节站立稳定性机构。一旦锁上,膝关节就保持在伸直的位置上,不能屈曲,绝对地保证了膝关节的稳定。当需要坐下时,必须用手把膝锁打开。
(2)力线封锁:是传统上最常用的保证膝关节支撑稳定性的方法,即在假肢装配对线时使膝关节轴线位于假肢承重力线的后方,靠重力的作用使膝关节在支撑期的前段和中段保持稳定。根据截肢者活动程度和控制能力不同,对力线偏移调整的要求也各不相同。
(3)承重自锁机构:一般有两个可以相对运动的摩擦面,在平常状态下不接触;当假肢支撑重力时,靠重力使摩擦面压紧,摩擦力就阻止了进一步的相对运动。设计得好的承重自锁机构能使膝关节在有一定屈曲角度时仍保持稳定。如果假肢承重不足,则稳定性不能保证。
(4)液压或气动传动的支撑期稳定机构
2.假肢膝关节摆动期控制机构
传统的膝关节摆动期控制方法是利用滑动摩擦阻尼,即让膝关节相对运动的表面具有一定得摩擦力。在摆动初期,大腿前摆,小腿落后,膝关节有屈曲运动趋势,摩擦力对抗这一运动趋势,帮助带动小腿前摆;而在摆动末期,大腿停止前摆,小腿由于惯性继续摆动,膝关节呈伸展运动趋势,摩擦力则对抗此趋势,使小腿的摆动减速。这种摩擦阻尼是不随运动速度大小而改变的,因此对于一定的行走速度,有一个最佳的阻尼状态;如果希望很快地或很慢地行走,则有必要调整阻尼的大小。目前假肢膝关节也关节也采用气压、液压阻尼的方法来实现膝关节摆动期控制。液压缸提供控制膝关节摆动所需要的阻尼,与机械摩擦阻尼不同,液压阻尼的特点是与运动速度成正比,因此它可以较好地适应步行速度的变化,大大改善摆动控制的性能。
3.膝关节助伸装置
助伸装置的主要作用是帮助小腿向前摆动,部分地代偿四头肌的功能,减少行走能量损耗。助伸装置有内、外两种形式。外助伸装置一般是简单的弹性带,装在膝关节前方。内助伸装置通常是弹簧。内助伸弹簧的起止位置经特定设计,使得弹簧在屈膝超过一定角度时不再助伸而助屈,保证坐下时膝关节保持稳定。