
The exoskeleton was developed to reduce the metabolic burden on the wearer.
Shouldn't exoskeletons be designed to help people with walking disabilities walk normally?
Why reduce the metabolic burden?
In fact, this involves the application of the classification of exoskeletons.
In general, we think that the exoskeleton system to assist patients with walking disorders (such as paraplegia, hemiplegia, etc.) to enable them to walk normally.
Our Chinese FULIYE X1 is designed with this goal in mind.
But harvard's flexible exoskeleton is designed to help normal people reduce the metabolic burden of long walks.
For example, soldiers can rely on flexible exoskeletons to reduce fatigue during long marches with heavy loads.
So, essentially, flexible exoskeletons have a very different audience than the rigid exoskeletons that are common today.
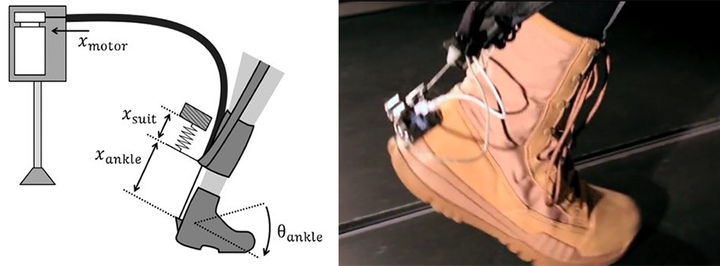
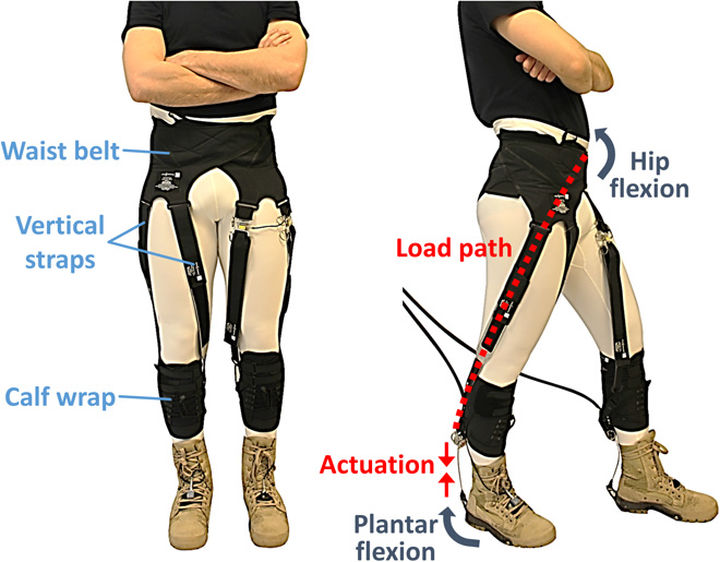
After a clear understanding of the original design of the exoskeleton, we will find the structure of the flexible exoskeleton: in fact, the flexible exoskeleton is a "motor + wire drive" dynamic structure.
One end is attached to the heel by a Bowden cord (similar to a bicycle brake cord) and secured with a calf bandage, while the other end is attached to an electrical device on the user's back.
When the user lifts the foot to take a step, the power unit tightens the wire to assist the user with the heel lift.
It's much less complicated than a rigid exoskeleton.
May see here, many science and engineering students immediately have a question: itself has a load on the wearer when a person carrying two Maxon motor and battery plus pulley, strap and other structural devices. So after all, does carrying this thing help you walk or add to your burden?
Then it's time to start experimenting!
The experiment involved getting seven participants to walk on a running track wearing an exoskeleton, and then using a series of sensors to measure their metabolism and gait changes in real time. But everyone's motivation is different. For example, heavier people need motors to produce more torque to drive them in the same "proportion" as lighter people.
Therefore, the weight of the participants and the driving force provided by the exoskeleton were divided into four grades according to the relevant formula: low assist ratio, medium assist ratio, high assist ratio and high assist ratio.
Through ANOVA analysis of variance, we can calculate the linear relationship between auxiliary force ratio and net metabolic rate (as shown in the figure below).
In other words, the higher the auxiliary ratio, the lower the metabolism, indicating the easier it is to walk.
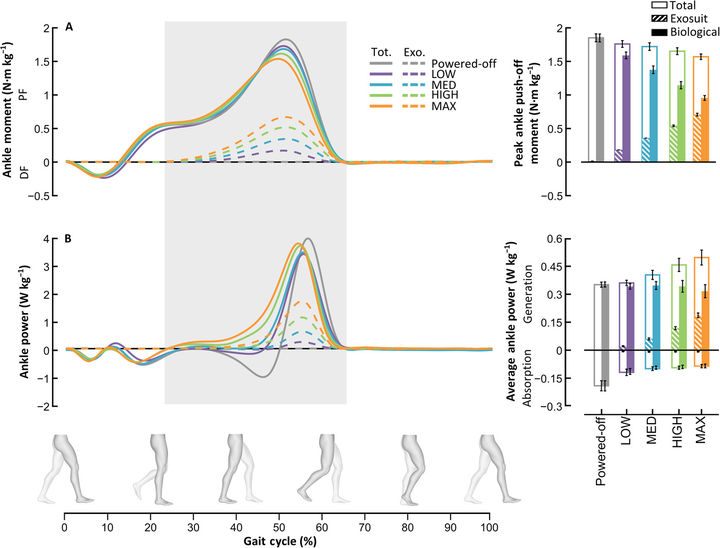
We then compared the momentum and energy of the ankle joint (pictured below).
We found that the greater the auxiliary ratio of the flexible exoskeleton, the smaller the joint torques and work of the human, and thus the smaller the total torques and work.
The momentum and energy data of the hip joint also indicate the same conclusion, that is, the greater the auxiliary ratio of the flexible exoskeleton, the smaller the joint torque and work of the human, and therefore the smaller the total torque and work of the joint.
Finally, the movement Angle of ankle joint, knee joint and hip joint of unit step was plotted (as shown below).
In the figure, the motion angles of hip joint and knee joint are basically the same under different auxiliary ratios.
Only the ankle Angle increased with the auxiliary ratio.
The relationship is actually pretty straightforward, the more force the Bowden line pulls on the ankle, the greater the Angle of the ankle, and the knee and hip joints are unaffected by the bowden line.
ccording to the data shown above, the final conclusion of the paper is that the greater the auxiliary ratio provided for the flexible exoskeleton robot, the lower the human metabolism.
When the helper ratio was at its maximum, the participants' metabolism was 22.83±3.17% lower.
This also proves that the exoskeleton can help the wearer walk for a long time.
The paper also says future research will use EMG to measure signals of muscle activity during walking.
USA YOBAND prosthetic innovation technology is shared, focusing on financial and material resources, focusing on and producing its own research and development, giving full play to its unique core competitive advantages, and fully integrating global resources with international peers for the benefit of disabled friends! So when selecting a prosthetic company, the amputee who installs prosthetic limbs must investigate on the spot to determine whether the prosthetic company really has a technical team to make a prosthetic receptor cavity. The qualified prosthetic receptor cavity plays a key role in their own comfortable experience and prosthetic walking gait.、
References:
Quinlivan, B.T., Lee, S., Malcolm, P., Rossi, D.M., Grimmer, M., Siviy, C., Karavas, N., Wagner, D., Asbeck, A.,
Galiana, I. and Walsh, C.J.,
2017. Assistance magnitude versus metabolic cost reductions for a tethered multiarticular soft exosuit. Science
Robotics, 2(2), p.eaah4416.

 Thigh Series
Thigh Series
 Lower Leg Series
Lower Leg Series
 Product Video
Product Video
 Group Propaganda Video
Group Propaganda Video


