跑动是人类最基本的运动方式之一,对于假肢穿戴者而言,跑动运动有助于恢复身体运动机能,可以有效地避免残肢肌肉萎缩。近几年,动力型下肢假肢的发展使穿戴者进行跑动运动成为可能,因此对假肢穿戴者跑动意图识别的研究十分关键。在国外,智能假肢性能不断提高,相应产品及样机的功能逐渐完善。各种假肢产品在运动状态识别、人机交互、能量效率等方面各有特色,优邦一直致力于假肢控制方法的研究,设计出多种动力型下肢跑动运动控制器,能够实现跑动与行走之间的转换;以下肢假肢在不同路况下行走的步态识别与控制为研究重点。
下肢假肢穿戴者的跑动状态与行走状态有很大的不同,步态周期缩短,使得支撑期的频率增高;造成跑动过程出现更强的颠振现象,使安装在假肢和残肢上的传感器发生信号振动问题。为了保证下肢运动信息的可靠性,单一的运动信息特征已无法满足要求。在结合已有研究报告的基础上发现,大腿残肢端股直肌部位与膝关节部位是不同运动模式下较典型的信号区,因此将多个肌电传感器、加速度计安装在股直肌和膝关节部位,采集大腿残肢端加速度信息、肌电信息及假肢膝关节加速度信息;结合双下肢足底压力信息,组成多维特征向量作为跑动步态识别模型的输入。另外,多特征参数的处理问题关系到分类器的识别率和稳定性,SVM在多种特征输入的故障检测问题上有着良好的分类效果,且在假肢跌倒异常步态识别中有所应用,故选取SVM作为跑动步态分类器,并利用PSO优化分类模型参数,解决全局优化问题,提高SVM次序分类模型的准确率。
一、步态分析与数据采集
在识别下肢假肢跑动步态之前,首先分析人体下肢的跑动运动模式。下肢跑动与行走都是人体交替换步的运动,但在动作结构方面存在根本区别。在下肢行走的运动过程中不会出现腾空现象,始终有一条腿与地面接触,行走的动作特点可以描述为单脚支撑与双脚支撑相互交替。在跑动运动过程中,在支撑末期单脚瞪伸离地后,下肢会出现腾空现象;紧接着另一只腿下落着地,出现与行走状态完全不同的单脚轮流支撑与腾空反复交替的运动过程。
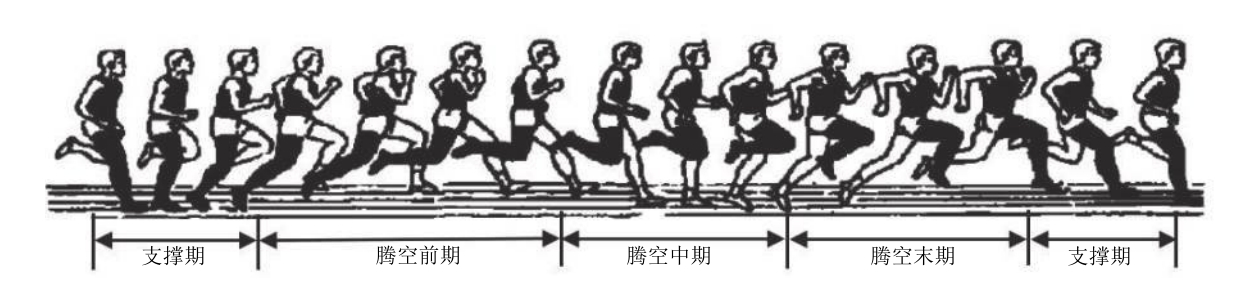
下肢假肢跑动步态的识别是以假肢侧为研究对象,讨论以假肢侧为主的单步跑动周期,因此将健肢侧支撑阶段划分至假肢侧腾空中期当中,并将整个跑动周期划分为支撑期与腾空期。腾空期分为3个阶段,分别为腾空前期、腾空中期、腾空末期,形体表现分别为腾空后折、支撑摆腿、腾空前伸。通过分析人体跑动运动特点发现,在跑动过程中,下肢支撑期状态与跑动速度有关。当低步速跑动时,支撑期是脚跟先着地;当步速达到一定程度时,支撑期转变为前脚掌先着地,但是该临界值受不同群体的身高、年龄等众多因素影响而没有严格的标准。在实际调研中,与假肢穿戴者和康复师交流发现,下肢假肢穿戴者跑动时身体协调性与正常人存在一定的差异。